
UN diplome teme
Zaznava ovir med svetilniki pri radijski lokalizaciji robotov
Marko Munih, somentor Peter Krapež
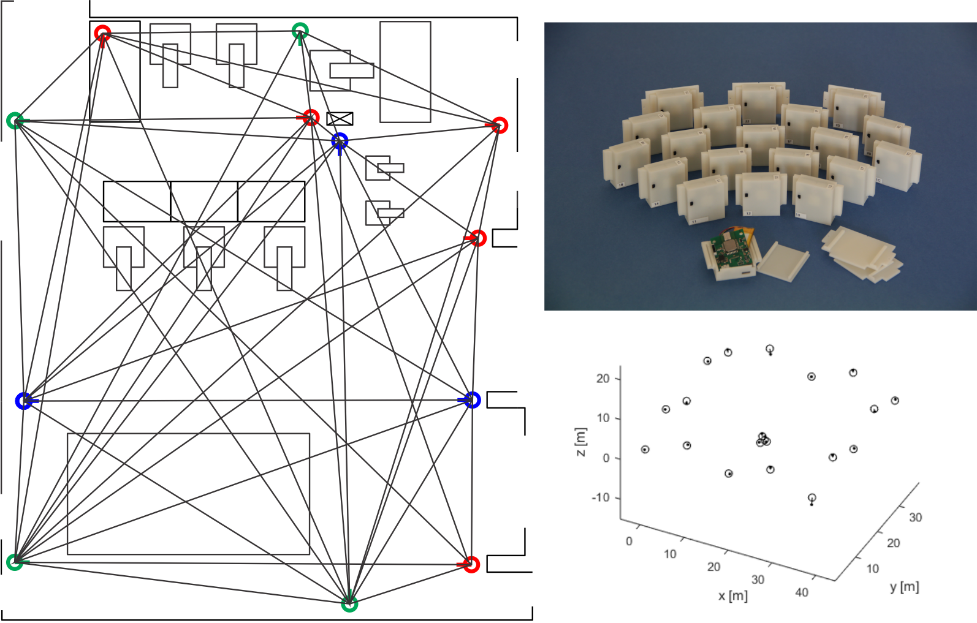
Za lokalizacijo uporabnika potrebujemo znane koordinate svetilnikov. Te lahko določimo z meritvami razdalj med svetilniki. V primeru ovire med parom svetilnikov dobimo napačno izmerjeno razdaljo, ta pa negativno vpliva na lokalizacijo svetilnikov. Algoritem, ki bi zaznal pare svetilnikov med katerimi je prisotna ovira, bi lahko pripomogel k zmanjšanju napake lokalizacije svetilnikov. Zasnovati je potrebno algoritem za postopno lokalizacijo svetilnikov z namenom izločanja svetilnikov, ki odstopajo od povprečne pozicije. Delovanje algoritma se preveri s simulacijami v programu Matlab. Končno validacija se bo izvedla z meritvami z realnim sistemom za lokalizacijo z umetno postavljenimi ovirami.
Detekcija gibanja robota s 3D kamerami
Marko Munih, somentor Luka Pogačnik
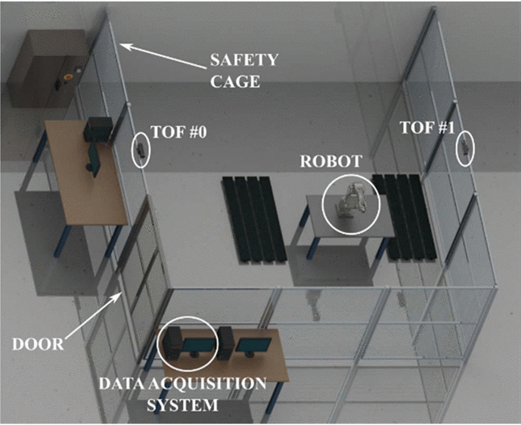
Najprej analizirajte dostopnost komercialnih 3D vizualnih kamer ter ToF kamer. Proizvajalci nam bodo zagotovili testne kamere, vi pa boste s pomočjo njihovih programskih paketov pripravili okolje, ki bo sposobno sledenje robota med gibanjem v delovnem prostoru.
Sistem izmenljivih robotskih prstov
Marko Munih, somentor Aleš Zore
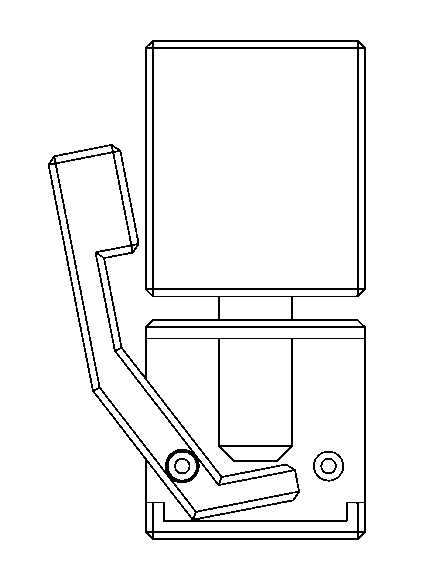
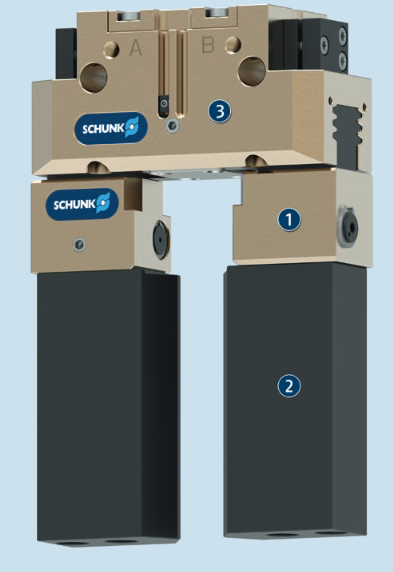
Izzivi dela: Iskanje inovativnega pristopa za izmenjavo prstov. Sistem za izmenjavo prstov naj bo majhen po volumnu in z majhno maso.
Cilji dela: Preučiti možnosti izmenjave prstov. Načrtati in izdelati prototip sistema za izmenjavo prstov (bodisi na električni način, mehanski način, magnetni način itd.). Izmenjavo prstov preizkusiti v praksi.
Metode reševanja: V prvi fazi bi raziskali vse obstoječe načine hitrega izmenjevanja dostopnega na trgu, ne samo v svetu robotike.
Preučili bi volumske gabarite, sile fiksiranja prstov in stabilnost fiksiranja prstov za številne načine aktuacije (električna aktuacija, mehanska aktuacija, itd.).
Vmesnik inkrementalnega kodirnika za platformo Raspberry Pi
Roman Kamnik
Razvijte vmesnik za zajem signalov inkrementalnih kodirnikov. Razvijte vmesniško vezje in ga priključite na računalniško platformo Raspberry Pi. Razvijte ustrezno programsko opremo za zajem in prikaz.
Nadzorno vezje za robotski krmilnik naprave za vadbo prstov in zapestja
Roman Kamnik
Za robotski krmilnik naprave za vadbo prstov in zapestja razvijte nadzorno vezje za nadzor pravilnosti delovanja. Vezje naj deluje neodvisno od robotskega krmilnika in naj v primeru zaznave nepravilnega delovanja ustrezno reagira za zagotovitev varnosti uporabnika.
Sistem za zajem sile interakcije na robotski napravi za vadbo prstov in zapestja
Roman Kamnik
Razvijte sistem za zajem sile interakcije med robotsko napravo za vadbo prstov in zapestja in uporabnikom. V mehanizem naprave vgradite ustrezen senzor, razvijte vmesniško vezje in ga priključite na računalniški sistem za zajem. Sistem za zajem sile ustrezno umirite.
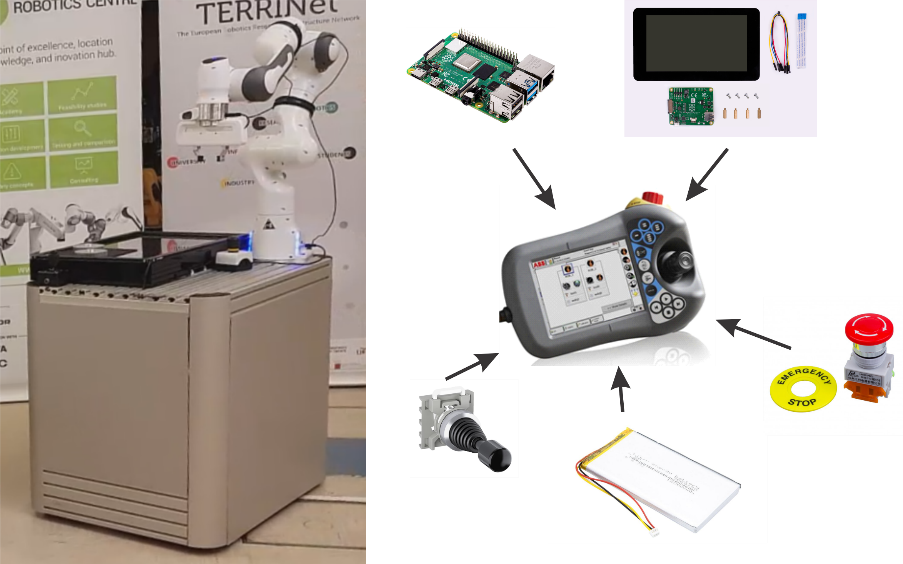
Brezžična krmilna enota za upravljanje mobilnega robota na podlagi Robotskega operacijskega sistema
Janez Podobnik, somentor Peter Kmecl
Cilj diplomskega dela je razviti brezžično krmilno enoto na podlagi Raspberry Pi z zaslonom na dotik in Robotskega operacijskega sistema (ROS) za upravljanje mobilnega robota. Razvoj vključuje povezavo strojnih komponent (Raspberry Pi z zaslonom na dotik, krmilna palica), razvoj ohišja, ki se bo izdelalo s 3D tiskanjem, razvoj grafičnega uporabniškega vmesnika, povezava vseh komponent na podlagi ROS. Na koncu bo izvedena demonstracija upravljanja in vodenja platforme v avli Fakultete za elektrotehniko.
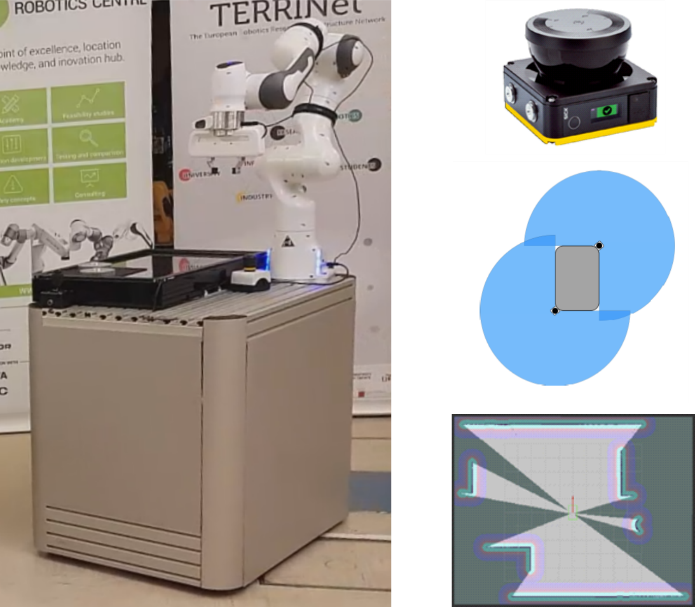
Razvoj varnostnega sistema za mobilnega robota z laserskimi senzorji
Janez Podobnik, somentor Peter Kmecl
Mobilni robot je opremljen z laserskimi senzorji za zaznavanje okolja in ovir v okolici mobilnega robota. Ker se mobilni robot giblje tudi v okolju, kjer se nahajajo ljudje in druge dinamične ovire je potrebno razviti ustrezen sistem zaznavanja okolice, da je avtomatizirano vodenje mobilnega robota varno za ljudi in opremo. Ker se mora robot gibati tekoče, ni dovolj, da se pred oviro samo ustavi. Razviti je potrebno pameten sistem zaznavanja, ki omogoča izogibanje oviram, ustrezno zmanjševanje hitrosti in varnega ustavljanja.
Lokalizacija mobilnega robota z uporabo široko pasovne radijske komunikacije
Janez Podobnik, somentor Peter Krapež
Pri diplomski nalogi boste uporabili razvite module za široko pasovno radijsko komunikacijo in razvili sistem za lokalizacijo mobilnega robota. Za delovanje lokalizacijskega sistema v realnem okolju je potrebno poznati njegove tehnične lastnosti. Za to potrebujemo meritve s sistemom v okolju, ki ima podobne lastnosti kot končno delovno okolje skupaj z referenčnimi meritvami pozicije mobilne platforme. Prvo je potrebno narediti analizo napake lokalizacije mobilne platforme v laboratorijskem okolju z referenčnim sistemom Optotrak. Sledi postavitev okolja z večjimi dimenzijami, ki je podoben trgovini, kjer bi za referenčne meritve pozicije mobilne platforme uporabili kamere.

Nadgradnja robota GLUON
Matjaž Mihelj, somentor Sebastjan Šlajpah
Robot GLUON je šestosni namizni robot, namenjen razvoju novih algoritmov v okolju ROS (Robotic Operating System). Sestavlja ga 6 aktuatorskih sklopov (motor + reduktor + inkrementalni dajalnik pozicije + krmilna elektronika), ki so med seboj povezani preko CANopen vodila. Tema diplomske naloga zajema razvoj mehanske, elektronske in programske nadgradnje robota. Načrtali boste ustrezno razširitveno elektroniko za povezavo razvojne plošče STM Nucleo v CANopen omrežje. Izdelali boste preprosto dvoprstno prijemalo, STM Nucleo pa boste uporabili kot krmilnik. Za vodenje robota boste dodali 3DOF krmilno palico. Vse dodane funkcionalnosti boste implementirali v končni aplikaciji, razviti v okolju ROS.


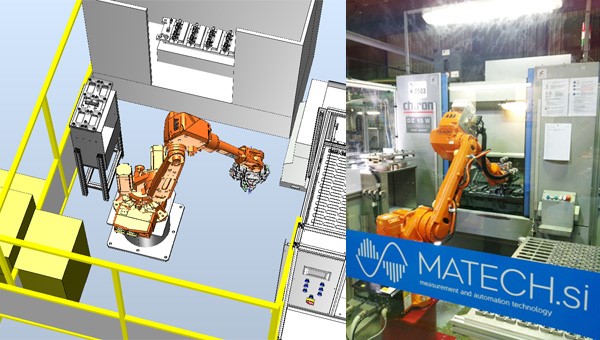
Izgradnja robotske celice
Matjaž Mihelj, somentor Sebastjan Šlajpah
V industrijskem okolju je inženir robotike večkrat postavljen pred nalogo celotnega razvoja robotske celice. Razvoj zajema definiranje robota in orodja, električno in pnevmatsko shemo, varnosti in izračun amortizacijskega časa. Tema diplomskega dela bo zajemala definicijo robotske celice, izdelavo simulacije, postavitev celice, izvedbo električnih in pnevmatskih povezav ter postavitev varnostnih elementov. Za to celico boste nato izdelali aplikacijo, kjer boste poleg programiranja robota uporabili tudi programirljiv logični krmilnik ter definirani varnostno logiko. Aplikacijo boste zaključili z ustrezno analizo tveganj ter jo dokumentirali.
Mobilni robotski sistem za precizno kmetijstvo
Matjaž Mihelj
Precizno kmetijstvo temelji na uporabi robotskih tehnologij. Tematika diplomske naloge se osredotoča na mobilno robotsko platformo za uporabo v kmetijstvu. Pomembni vidiki so lokalizacija platforme na osnovi globalnega navigacijskega satelitskega sistema (GNSS) z realnočasnim kinematičnim pozicioniranjem (RTK), navigacija z upoštevanjem zaznanih ovir v prostoru ter izvajanje nalog, kot so vzorčenje oziroma analiza prsti, uničevanje plevela ter pobiranje pridelkov. Osnova za izvedbo diplomske naloge bo obstoječa mobilna platforma (gosenična ali kolesna), ki jo bomo nadgradili z ustreznimi funkcionalnostmi. Delovanje mobilnega robotskega sistema bomo preizkusili v realnih pogojih.
